Remember the time when fully-functional humanoid robots are just part of science fiction? Robots that can stand the extremes and do jobs that no man can be capable of. This then-fictional concept is now part of our reality. Several companies have already created self-moving and task capable robots.
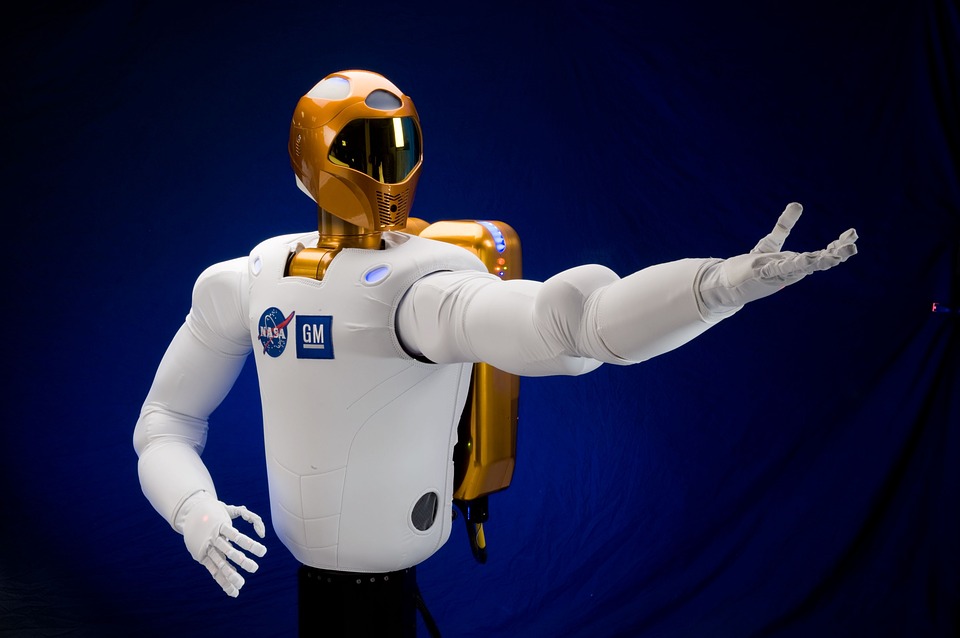
Boston Dynamics has Spot, the robot dog that is capable of helping in different industries. Honda, on the other hand, has the lovable Asimo, a robot capable of moving and taking on penalty kicks. However, NASA has also introduced its own capable robot, Valkyrie.
Valkyrie was introduced in 2013 and has since been worked on by NASA in the Johnson Space Center. NASA is aiming Valkyrie to be a humanoid robot capable of working in desolate areas. However, the end goal for NASA is to send it into space as part of our on-going expansion. Back in 2017, NASA conducted tests with Valkyrie during their Space Robotics Challenge.
Imagine, these robots will be deployed into outer space and work on transforming other celestial beings from desolate to habitable areas. Think of Mars, the moon and any other planet which can support life once terraformed. However, while NASA is still working on Valkyrie, they might be looking into the future.
According to an article published by spectrum.ieee.org, NASA is now on the hunt for engineers. These engineers will focus on robotic electronic systems which means that NASA might be looking into what’s next.
Work on Humanoid Robots As Part of NASA

NASA is looking to hire engineers that will directly report to the Johnson Space Center in Houston, Texas. Once hired, these engineers will work under the Electronics and Electrical Design Team. Under this team, potential hires will work on Valkyrie as well as design the next generation of humanoid robots.
One of the bigger tasks of the job is to help working with existing humanoid robots as well as to help in advancing the agency’s goal for them. That is for these humanoid robots to be able to work in extreme locations here on Earth and in space.
Another task is to help in designing the next generation of humanoid robots. The engineers’ main contribution would be to focus on the electronics and electrical aspects of the design. This includes working on the battery and power conversion.
However, you can expect that NASA will look for the best candidates available. You can view the requirements for the position and their expectations by clicking here. They also have stated the reasons why you should work with NASA.
NASA has also stated other responsibilities of the job as well as specific rules regarding attendance.
What are you waiting for? If you are capable of meeting there requirements and expectations, then apply for that dream job now. However, this job opening is currently only available to American Citizens. Applicants should also be willing to undergo a background check with the U.S. government conducting it. Lastly, candidates are willing to relocate to Houston, Texas once hired.