





A robot hand makes the workstation more flexible because it can transport material faster and more efficiently between workbench, peripheral devices, and automotive assembly lines. It is a subcategory of the industrial robot and the most common class of manufacturing robots.
The robot hand is structured to carry out any type of task like welding, holding things, turning materials and so on. It depends on the application. For instance, a robotic hand in automotive assembly lines carries out different types of tasks and this includes welding, the spinning of automotive parts and installation during a car assembly.

Robot Hand: How It Works
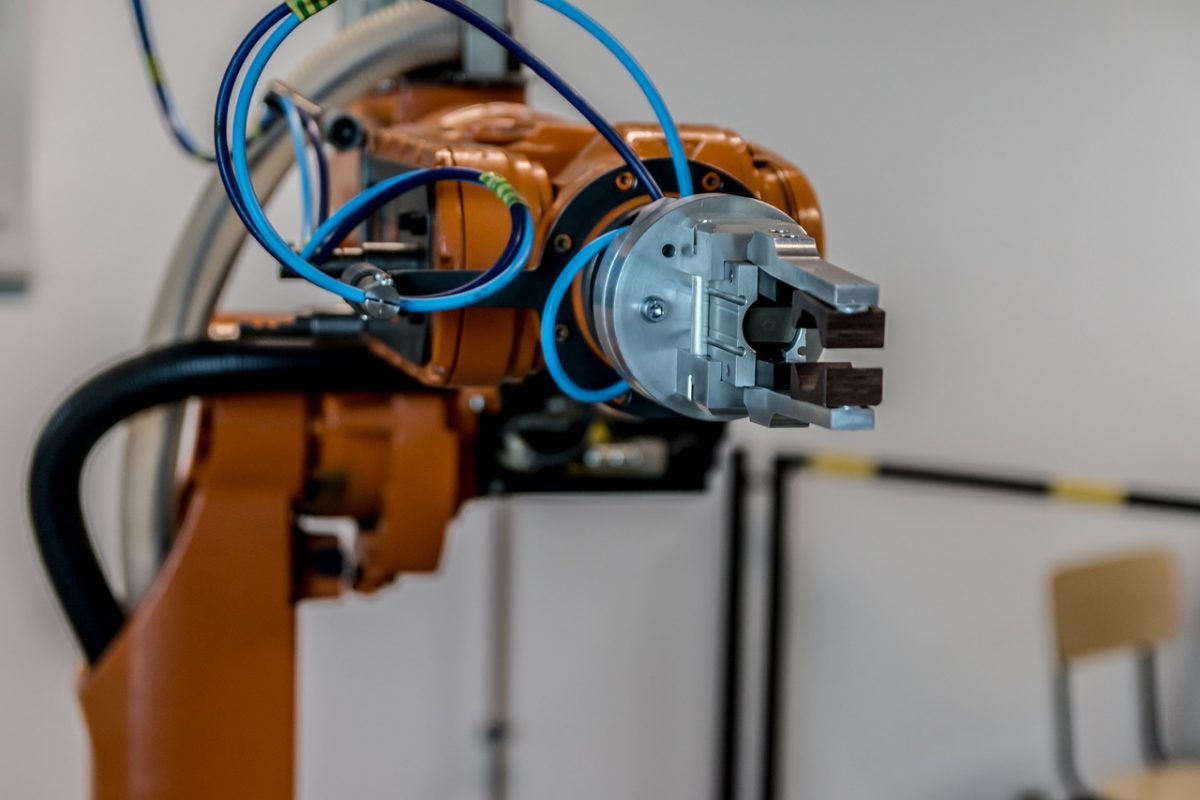
You can ensemble robotic arms with different types of end effectors depending on the nature of work and application. A simple example of the robotic hand end effector is the one that looks similar to the human hand which can grip and lifts different objects.
Robotic hand frequently features inbuilt pressure sensors that tell the computer when it is gripping with the right amount of strength. This prevents a situation where the robot hand fails to apply the right amount of pressure which can cause the robot hand to drop or break the material it is lifting or carrying.
Besides the robot hand end effector that looks similar to the human hand, there are other types of end effectors like blowtorches, drills and spray painters. Robotic hands are structured to perform specific tasks repetitively in a well-regulated environment.
Hydraulics Robot Hand
The developer of the prosthetics hand commonly directs the robot hand through the various motions with the use of a handheld controller. The robot hand stores the precise order of motions in its memory and then repeats the motion over and over again anytime a fresh unit exits out of the assembly. A standard prosthetic hand consists of seven metal segments fixed together by six joints.
The computer regulates the bionic hand by spinning discrete step motors linked to each one of the joints. A few bigger robot prosthetics utilize hydraulics or pneumatics system to regulate the robot’s hands as opposed to the standard motors and step motors that move in precise increments.
This permits the computer to transport the robotic hand in a very precise manner while making the same precise movement repeatedly. A motion sensor is built into a robot hand to estimate the exact amount of movement it would make. A robot had made up of six joints look very much like a human arm.
The robot prosthetic’s joints are similar to the shoulder, elbow, and wrist on the human arm. The shoulder of the bionic hand is basically attached to a stationary base structure instead of on a mobile body. Thus, a robotic hand comes with six degrees of freedom and can swivel in six different ways as opposed to the human arm that has seven degrees of freedom.

How Does A Hydraulic Robot Work?
The hydraulic robot hand commonly works by simply transferring energy. The pressure is created at one end of a fluid-filled tube. And the pressure is used on a piston or related structure on the other end. You can generate a mechanical advantage when you exert pressure across a large surface. After you have done this, you can apply pressure to a smaller location.
The actuation used by the hydraulic robotic arm is a linear actuator which involves the use of hydraulic actuators. While the hydraulic system mounts on one connection and the piston pushes or pulls the link close to it, the linear actuation structure makes the joints of the robot hand to rotate and this is how the robot prosthetics’ works.
Robot Hand: Benefits
The role of the human arm is to move the hand from one location to the other. Similarly, a robot hand moves its end-effector from one location to the other. Most prosthetics robot works in car assembly lines and helps to put cars together. These industrial robots perform a lot of these roles better than humans. They equally provide a more accurate result.
For instance, they constantly drill in precisely the same location and constantly screws bolts with precisely related amounts of pressure, irrespective of the number of hours they have to operate. Robotic hands are equally very useful in computer assembly. They make it possible for the incredible microchip to be assembled precisely.
Industrial Applications
The robot hand is used for many industrial applications. They can be used to weld, lift materials and utilized for thermal spraying. They equally paint and drill. The technology built into the robotic hand comes with human-related agility in a lot of different environments.
Some of these work environments where the use of the robotic hand is priceless include nuclear power stations, welding and pipelines repair on the floor of the ocean. They are equally vital in the servicing of isolated power lines and for cleaning of radioactive or other harmful wastes.

Manufacturing Sector
A good example of the application of the robotic arm is in the auto-manufacturing industry.
The use of a robot arm in the automotive industry has resulted in the manufacturing boom. The majority of robot prosthetics operate in car assembly lines. They do most of these works better and more accurate than their human counterparts. Robotic hands are equally faster than humans.
Thanks to the utilization of robot hand in assembly lines, humans can now breathe a sigh of relief. Workers face reduced exposure from work risk situations.
Cost-Efficient
Additionally, robots can produce items at a lower cost than human workers. Presently, robotic-assisted car production makes it easier for car manufacturers.
The robot’s hands can save a lot of money compared to the cost of hiring human laborers. Also, a robot doesn’t fall sick, go on work strike or slow down the work pace due to tiredness. It works more efficiently and doesn’t suffer from the majority of issues that affect the efficiency of a human laborer. There are no sick days, strikes, work slowdowns or other problems that can crop up with humans.
The robot hand can perform tasks round the clock with minimal human interventions. The car-production industry is one good example of the use of the robot hand.
















