For many of us, Google Maps has become instrumental in our daily lives. There is almost no place you can’t find on Google Maps. You can look for a business, a landmark, or even a geographical feature. Zoom out on Google Maps, and you will see literally the entire planet Earth. However, like every software as a service (SaaS), Google Maps relies a lot on connectivity. It works best when you have a strong internet connection through which it streams data. But that isn’t always going to be the case.
There will be times when Google Maps is not working. Thankfully, the developers know well that their product can be used in a variety of different circumstances. In order to be available when people need it, Google Maps has accessible and easy-to-use features that enable offline usage.
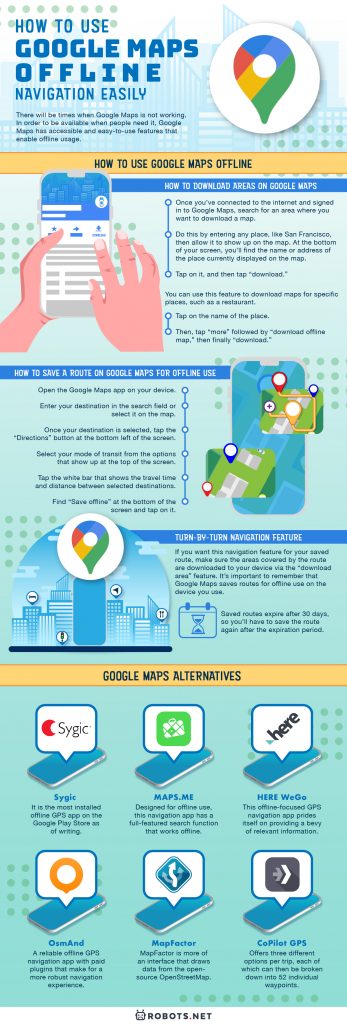
How to Use Google Maps Offline
One nifty feature of Google Maps is the ability to download maps on your device and use it when you’re offline. This is called the “download area” feature that will be useful for saving routes as well. To download area maps, you’ll need a solid internet connection. In addition, you’ll also need enough space in either your internal storage or SD card.
How to Download Areas on Google Maps
Just follow the steps below to download areas and specific places on Google Maps.
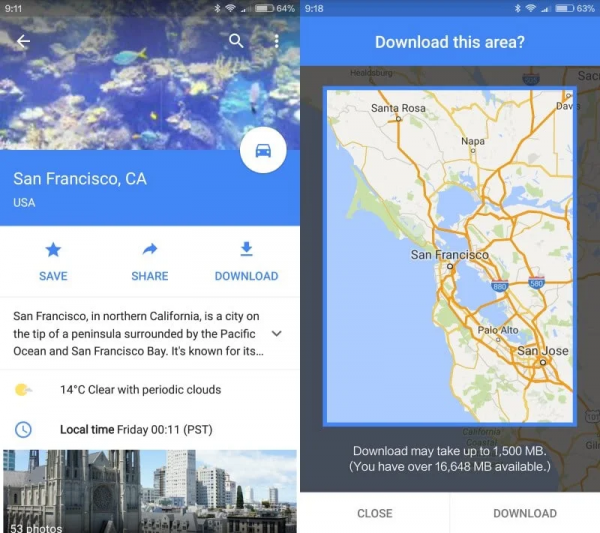
1. Once you’ve connected to the internet and signed in to Google Maps, search for an area where you want to download a map.
2. Do this by entering any place, like San Francisco, then allow it to show up on the map. At the bottom of your screen, you’ll find the name or address of the place currently displayed on the map.
3. Tap on it, and then tap “download.”
You can use this feature to download maps for specific places, such as a restaurant. There is an extra step for downloading maps this way, but the process is essentially the same.
1. Tap on the name of the place.
2. Then, tap “more” followed by “download offline map,” then finally “download.”
By default, area maps are downloaded to the internal storage of your device. To save storage, save it on an SD card instead.
1. Open the Google Maps app.
2. Tap the Account menu at the top-right corner, and tap “offline maps.”
3. Select the “settings” button, then “storage preferences.”
4. From there, you can set your device to download Google Maps data by tapping on “device” then selecting “SD card.”
How to Save a Route on Google Maps for Offline Use
You can take a step further in using Google Maps offline by saving routes. This is particularly convenient when you take the same route frequently and want to save on data usage. Also, it detects places that may have poor internet connectivity.
1. Open the Google Maps app on your device.
2. Enter your destination in the search field or select it on the map.
3. Once your destination is selected, tap the “Directions” button at the bottom left of the screen.
4. Select your mode of transit from the options that show up at the top of the screen.
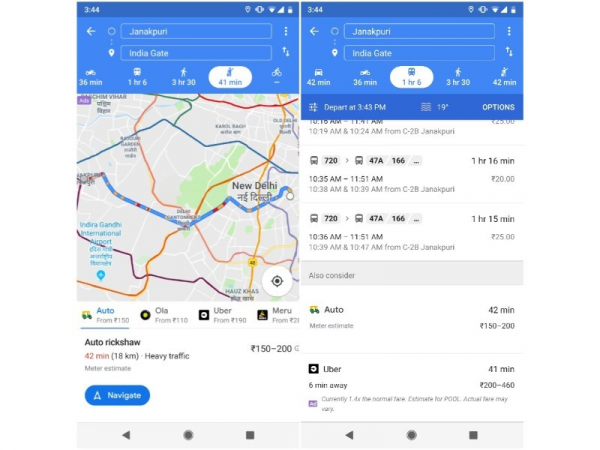
5. Tap the white bar that shows the travel time and distance between selected destinations.
6. Find “Save offline” at the bottom of the screen and tap on it.
It really is that simple and quite intuitive once you’ve saved routes a few times. Finding your saved route is just as easy. To find your saved routes either for online or offline use, just tap the “Saved” button at the bottom of the Google Maps app. Remember that if you save a route using the “Your location” feature, the directions will start from the place you saved the route instead of your current location.
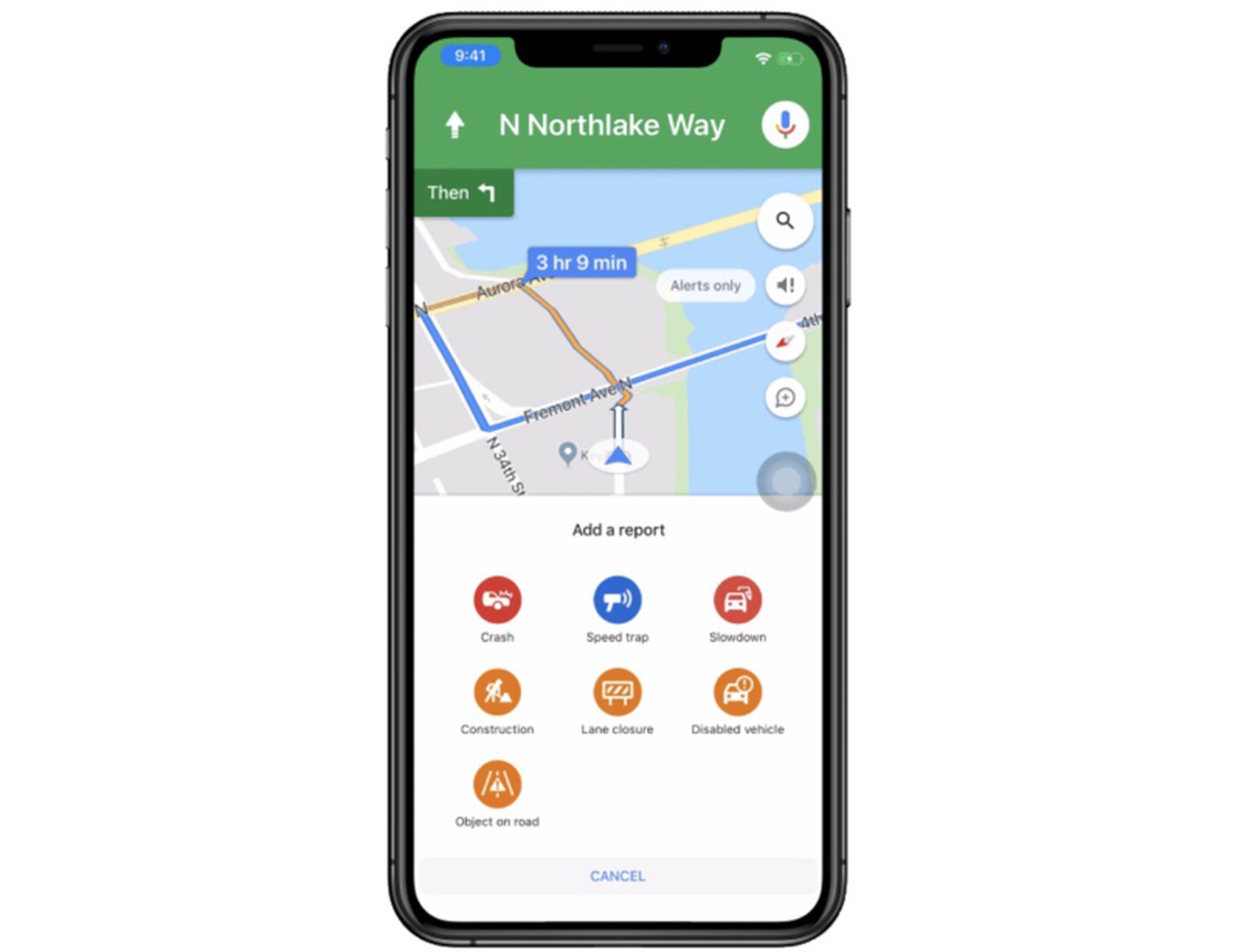
Turn-by-Turn Navigation Feature
Turn-by-turn navigation may also not be available; if you want this navigation feature for your saved route, make sure the areas covered by the route are downloaded to your device via the “download area” feature.
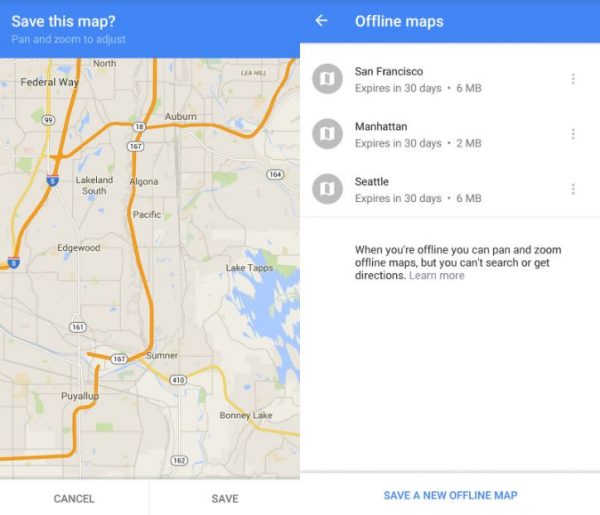
It’s important to remember that Google Maps saves routes for offline use on the device you use. You won’t be able to access your saved routes on other devices even if you use the same Google account. So, make sure to save the route on the device that you will be using. The saved route will pre-select the mode of transit you used. Additionally, saved routes expire after 30 days, so you’ll have to save the route again after the expiration period.
How to Change Route on Google Maps
Changing routes is a common feature on Google Maps that most of us know about. To pick a different route, once you have your destination selected, all you have to do is choose one of the multiple routes displayed on the map.
When using Google Maps offline, the process is a little different. Because saved routes use the mode of transport you selected when you saved the route, other routes may not show up. If you want to be able to change routes while using Google Maps offline, make sure to save the route for each transit means that you are likely to use.
How Much Data Google Maps Consumes
One of the reasons why you may want your Google Maps directions available offline is that you’re concerned about data usage. But how much data does Google Maps use, exactly?
For the average user, Google Maps uses about 0.7 MB of data every 10 miles and 0.75 MB for every 20 minutes. The hypothetical user in this case has already used Google Maps several times. New users will notice that the app consumes more data, while people who take the same routes every day will notice less data consumption.
To put in perspective how much data Google Maps uses, streaming a song four to five minutes in length at normal quality typically costs around 2 MB to 3 MB. Therefore, Google Maps will use much fewer data than streaming music, provided that you use it often in areas you frequent.
Google Maps Alternatives

While Google Maps is a top choice for navigation apps you can use online, it’s worth looking at the competition. Here are some of the noteworthy apps you can use in place of Google Maps.
Sygic

The makers of Sygic call the app “the world’s most advanced offline GPS Navigation app” and a lot of users seem to agree with it. It is the most installed offline GPS app on the Google Play Store as of writing.
It offers reliable offline maps and voice-guided GPS navigation. When used online, Sygic has more features such as automatic alerts when you’re near points of interest such as gas stations, parking lots, and even upcoming speed cameras.
One caveat is that some features are locked to the paid version, which you can use for free for the first seven days. However, the free version is beefy enough for most of your navigation needs.
MAPS.ME
For a completely free, open-source alternative, there is MAPS.ME, also known as MapsWithMe. Designed for offline use, this navigation app has a full-featured search function that works offline. It has other basic features you’d expect from a navigation app, such as calculating re-routes and displaying places of interest.
When using MAPS.ME online, you can share your location with other people, make hotel bookings, and use other basic online features. It is ad-supported, but you can make a small donation to remove the ads.
HERE WeGo
This offline-focused GPS navigation app prides itself on providing a bevy of relevant information even without internet connectivity. What this means is you can use it offline while having access to ticket prices for public transportation and car-sharing services, bus and train timetables, and other pertinent information.
It also has an offline-compatible transport mode comparison tool that shows you travel data such as routes and ETA for different modes of travel: pedestrian, bike, taxi, public transportation, and car. Its public transportation information coverage spans across 1,300 cities around the world, including most of North America and Europe. As a nice little bonus, HERE WeGo even shows you if you will be travelling uphill or downhill. Like MAPS.ME, it is also free and ad-supported.
OsmAnd
OsmAnd is a reliable offline GPS navigation app with paid plugins that make for a more robust navigation experience. Combining the strengths of two open-source platforms — OpenStreetMap and Wikipedia — it has features you won’t always find in its competitors. These include opening times and accepted payment methods of stores in select countries.
One of its plugins offers route maps of the world’s most popular resorts, which is a convenient feature for any ski trip. There are also options for displaying foot, hiking and bike paths, which makes OsmAnd particularly friendly for nature and outdoor lovers. Minimalists can choose to view just road network data, which helps improve the app’s performance on older devices.
MapFactor
You can tell that MapFactor is designed for offline usage as soon as you open it for the first time. The first prompt you’ll see will ask you to download the maps you want.
MapFactor is more of an interface that draws data from the open-source OpenStreetMap, which has over 200 standalone maps to choose from. While not the most extensive map app, MapFactor still has 53 maps in the Americas and 56 in Europe available for download. Some maps may have speed camera information wherever applicable.
CoPilot GPS

If you use your navigation app primarily while driving, CoPilot GPS may be an interesting choice. Designed from the ground up for in-car navigation, this app offers three different options per trip, each of which can then be broken down into 52 individual waypoints. It also offers the usual places of interest and visual turn-by-turn directions features — all available offline.
The basic features are free, but the paid version gives you 3D maps and an audio navigation assistant, among other things. Because CoPilot GPS is specifically designed for in-car use, you’ll want to check out the other apps if you use public transportation or other modes of transit.
Final Thoughts
As one of the most comprehensive and reliable GPS navigation apps around, Google Maps helps us navigate through an increasingly busy and congested world. From its early days of being a simple mapping and navigation software service, Google Maps has now incorporated Street View so you can view locations as if you’re there. Also, it is now loaded with a bevy of essential features and perhaps the most extensive mapping database in history.
In recent times, however, there really isn’t a shortage of choice when it comes to competent and reliable GPS navigation services. Some of them are designed specifically for either online or offline use, while others are respectable performers in both situations. As with everything in life, preparation is key. As long as you’re prepared, you may not need to be online at all to get the most out of your preferred GPS navigation app.